Project Synergy
| Date | 2018 |
| Location | Manchester, UK |
| Funding | $5,000,000 InnovateUK |
| Principal Investigator | Ulysses Sengupta |
| Co-Investigator | Rob Hyde |
| Researchers | Solon Solomou Sigita Zigure |
Summary
Project Synergy is a £5 million Innovate UK funded project. The aim of this project is to further develop innovative technologies for connected autonomous vehicles to accelerate adoption of driverless vehicles and allied technologies in the UK.
This project will introduce innovative technologies to operate connected autonomous cars in a platoon formation from Stockport directly to the arrivals terminal at Manchester Airport. Concurrently, a platoon of three pods will transit passengers to and from a car park in the airport to the passenger terminals.
Project Synergy will facilitate inclusive accessible transport for the aged and the visually impaired. Innovations include:
- Rapid battery charging using graphene supercapacitors enabling power sharing between vehicles.
- An Artificial Intelligence system will provide natural conversation concierge service to users.
- Design of secure connectivity solutions for real-time communications of the platoon convoy within urban infrastructure.
- Development of control strategies and sensor technologies to facilitate platooning.
- Development of series of resource competition models and route optimisation models for connected autonomous vehicles in Manchester.
- Development of series of resource competition models and route optimisation models for connected autonomous vehicles in Manchester.
- Deployment of resource sharing such as audio and video between the vehicles during platooning operation.
Team
The research team for this project are members of the CPU Lab – which is directed by Ulysses Sengupta.
Aims and Objectives
The aim of this project is to further develop innovative technologies for connected autonomous vehicles to accelerate adoption of driverless vehicles and allied technologies in the UK.
- To expand the platooning concept through concept transfer from ecological, social and biological perspectives.
- To undertake popular and expert discourse analysis to understand the landscape of AV integration on public roads in the UK.
- To develop a digital simulation model testing the integration and disruptions resulting from the introduction of AV into a competitive environment with other forms of transport services and passengers.
- To examine advantageous routes for the deployment of AV through data mapping.
Results: Digital Simulation Model
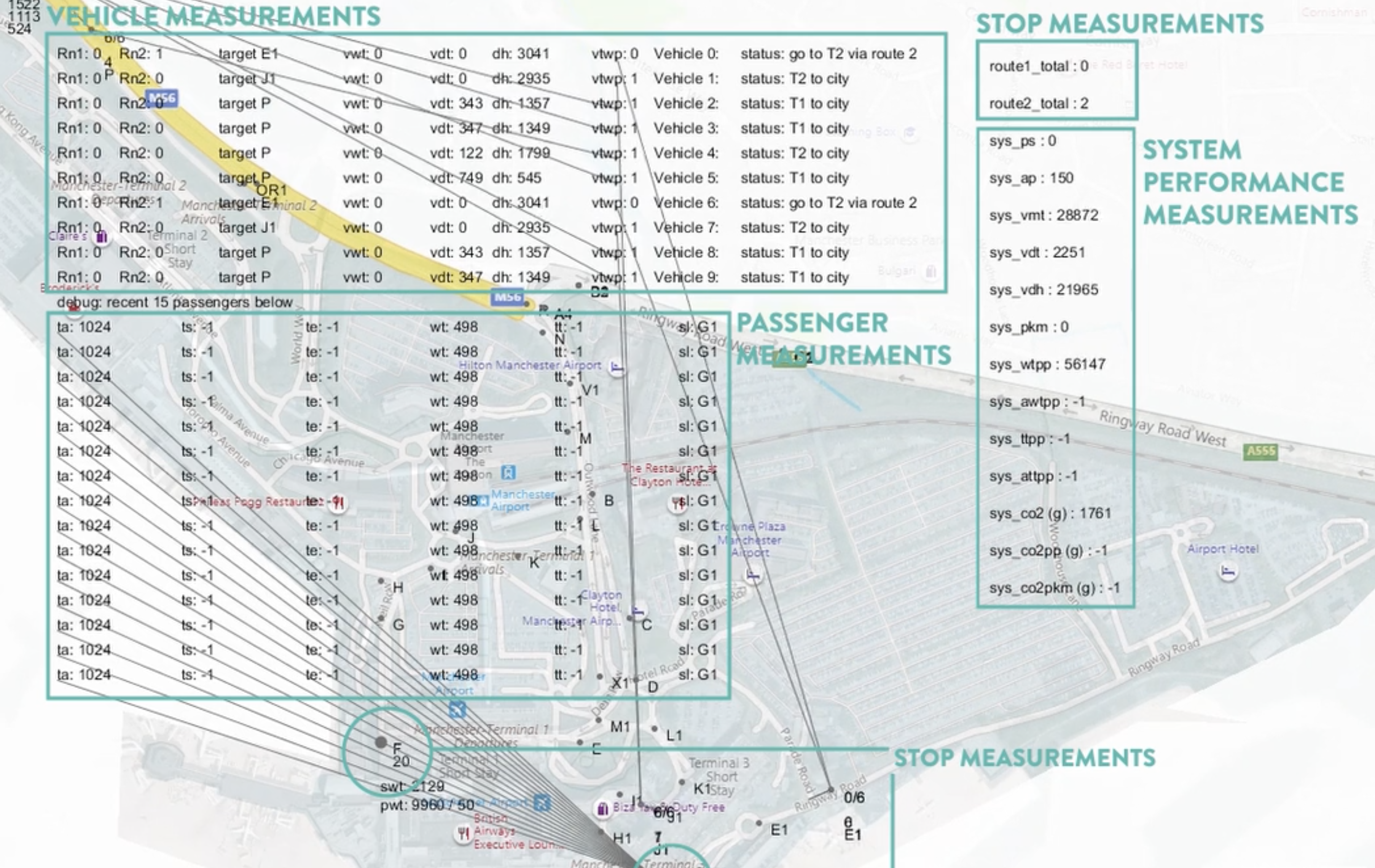
Development of a digital simulation model for Manchester Airport to test different modes of transport. Comparing future Connected Autonomous Vehicles (CAV) rapid personal transport system against the existing Taxi system.
Findings highlighted a distinct performance variance favouring different stakeholders. The existing Taxi system favoured operator interest such as minimising dwell time, deadhead time, average travel time and overall vehicle distance travelled.
The CAV system seemed to favour the user and city stakeholders with better performance in measures such as user wait time, number of passengers waiting, total CO2 emissions and CO2 emissions per passenger.
Model Development
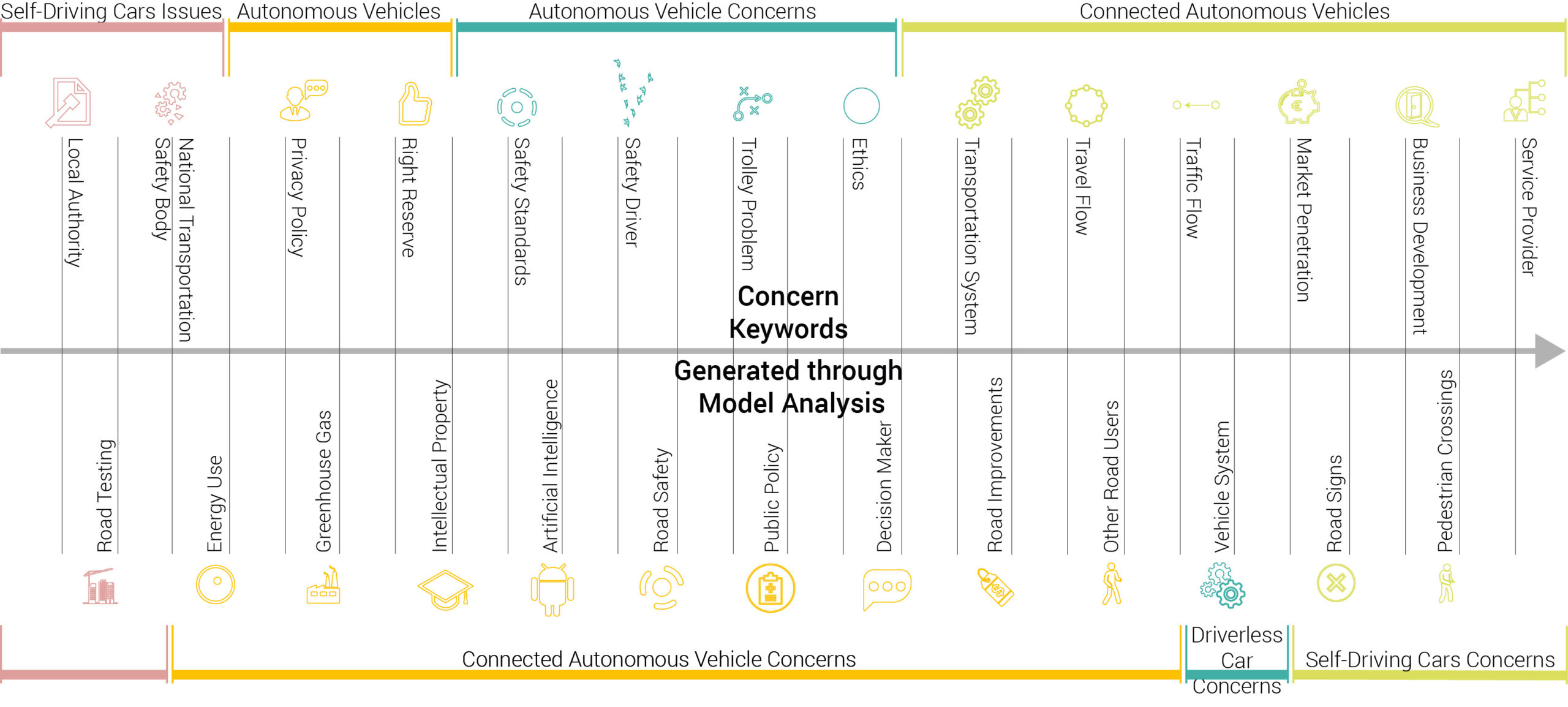
Discourse Analysis
Using specific terms as search criteria in the web, a collection of 682 sources were analysed to distill a number of specific words relating to concerns surrounding the implementation of CAVs on public roads.
From this analysis, 10 concerns have been identified as the dominants in the written discourse. These concerns are as follows:
- Travel Time
- Personal Data / Privacy Policy
- Travel Flow
- Road Safety / Public Policy
- Vehicle Safety Standards
- Ethics / Decision Making for AV
- Market Uptake of Technology
- Changing Transportation Systems
- Energy Use
- Infrastructure Improvements
These concerns have been reinforced as well as debated using real-world interviews with specific groups as well as results from workshops conducted in an international conference. The result of this study identifies the concerns found in the discourse as valid when going forward with a CAV dominated future mobility system. At the same time, not enough mention on the transition of the technology exists within the discourse with concerns focused on the end result rather than the journey.
Platooning Concept Transfer
The word platoon has its origins from the french word peloton, which refers to a group of cyclists in particular the main mass of cyclist riding in some kind of formation in the race. Platoon in the army refers to a principal subdivision of a military unit.
The benefits of increased efficiency, minimising human errors and safety advantages are some of the main drivers for implementing this technology for various vehicles (such a drones, army vehicles, public and private transport). Insects, birds and fish display collective behaviour that is based on each member’s localised knowledge and interaction with its neighbours.
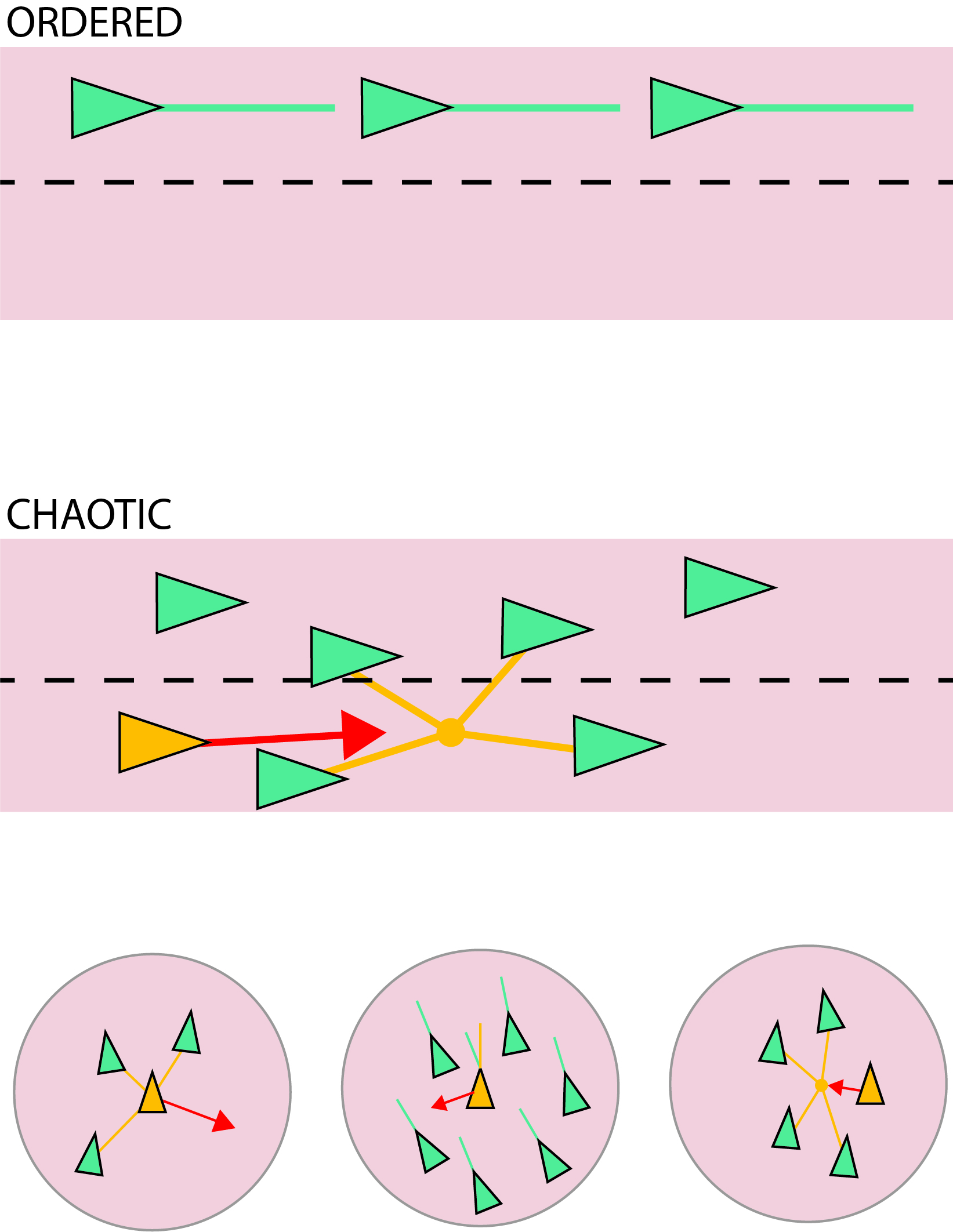
The aim of this report is to expand the platooning concept. At the moment, platooning of CAVs is understood as a formation of vehicles where there is one lead vehicle and following vehicles that communicate with each other. This allows the vehicles to move more efficiently (reducing drag and having less unnecessary accelerating and breaking compared to human drivers) and safely as it eliminates human error, which is the main cause of traffic accidents.
In this report we will look into the origins of platooning as a term in order to understand the origins of the concept. Then we will look into nature and human-made formations and methods that display similar characteristics to platooning and how they have been applied in other areas.
At the end, we will provide our observations and comments to how the platooning concept for CAVs could potentially be expanded further. Herds of animals, fish schools, and flocks of birds are characterized by an aggregate motion, main characteristics of which are:
- Autonomy
- Distributed Functioning
- Self-Organising Capacities
Flocking and Swarming are behaviour models that have been studied and applied to crowd modelling, computerised problem solving, AI, swarm robots and unmanned vehicles.
Our research so far into platooning in nature does not indicate a need for a conventional leader. Although the idea of a lead car is in some ways warranted in an autonomous vehicle system, must that leader be predefined? The question arises as exploration into natural systems saw leadership of a flock of birds or ants / bee movement being shared among all members of the group.
We offer behaviour patterns as an alternative to existing leader following structure of platooning CAVs.